LiMON UAV ��һ��ǿ�����Ч�Ĺ��ߣ����ڿ��ٱ�ݵĵ��Ʒ��ࡢ���Ʊ༭�ʹ���������Ʒ���������������˻�����IJ�Ʒ�� LiMON UAV is a powerful and efficient tool for fast and convenient point cloud classification, point cloud editing and creation of derived products especially from UAV surveys.
������ʾ - ��� 4 ����ȫ֧�� 3D ��ʾ����ͼ
- ������ʾģʽ��RGB��ǿ�ȡ��̡߳����ࡢ��ϡ��ļ���ɫ
��������ʾ 3D ���� - ���ڵ��ƴ��� 3D ����
- ��ʵ�塢RGB��ǿ�ȡ��̡߳����ࡢ��ϡ��ļ���ɫģʽ��ʾ����
- ��ʾ�����߿�
- ���������ϸ����Ⱦ��Χ


��ʾ 3D ģ�� - GML�� OBJ�� 3DS�� DAE�� FBX�� IFC
- ��ģʽ��ʾģ�ͣ�ԭʼ��Ҳ���������������ȣ���������������
- �任����ģ�ͣ�ƽ�ơ���ת������
�ֶ����Ʒ��� - �����Լ��ķ����
- ���Ρ���״�����ȷ���
- ���Ϸ����·��ķ���
- ʹ����״��ǽ��з���
- ��� Z ����
- �ض�ǿ�ȷ�Χ�ڵķ���


�Զ����Ʒ��� - �Զ��Ե�����з���
- �������Զ�����
- ֲ���Զ�����
- �༭���з���ģʽ�IJ���
�����ɷ��������� - Զ�̷��� ��LAN/WAN�� �� LiMON ����������������
- ��Ŀѡ��
- �����ܶ�ˮƽѡ��������ʾ
- Ԫ���ݶ�ȡ
- �����ɷ�������ʾ��Ŀ�ķ�Χ
- �����״����ݵ����غͿ��ӻ�


ά��ϵͳ֧��
դ������ - JPG�� JPEG
- JP2�� J2K
- �ٷٷ�
- ���ӵ�������


���� �ļ� - ��ѡ��ͼ�е������ļ�
- ������������
- �Գ���������
- �̶�����/����
- Z ��������
- ��̬�ƶ�
Document creating module - Dimensioning based on point clouds (distance, height, altitude point, the angle of inclination)
- Page size/color definition, output scale, template
- Setting out of the output scale
- Dimension lines and fonts editing
- Insert and edit names nad grid lines
- Choice global/relative coordinates
- Saving as a image file (JPG, PNG, BMP, TIF, TIFF)
- Export to DXF format (as an integrated raster)


Vector data - Point markers
- Line markers
- Shape markers
- Circle markers
- Relative height markers
- Markers save / load (KML, SHP, TXT)
Measurements 

Point cloud snapping - Snapping to the point cloud (on/ff)
- Precision drawing in the profile view
Coordinate systems - Full EPSG coordinates support
- Point cloud coordinates system transformation


�����ͼ - ���ԭ�� ��XYZ��
- ������� ��XYZ��
- ����
���ú� - ��ͼ�еļ��ÿ���
- ��ֵ��ƽ�涨��
- ��̬�ƶ�


���˻� - ���ƶ���
- Wpasowanie GCP
- ���������ķ��ࡣ
- Ϊ������ɫ
- ��������
�߶��ͺ� DTM��˹��nDSM��Ϣ�����������ȸ���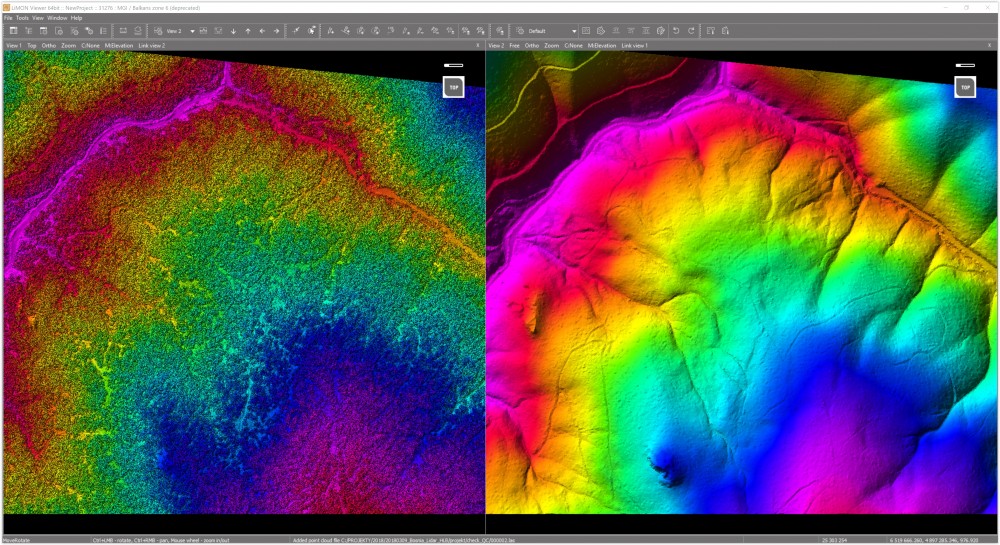
�������ʾ���������г������ݡ�
�����ֻ�Ա������ƭ�ķ�����ȡ�Ƹ�,�����̾ٱ�,���ǻ�Ի�Ա����2-N���ķ���,�����߷��ID!
�˶�Ϊ���۵����ݣ��������ʾ

